空天地海数字一体化解决方案提供商
激光三维扫描仪+3DGS采用行业领先的实时解算SLAM技术,通过手持激光器在陌生环境中,不依赖外部定位设施的情况下,也能完成高精度地图的构建,无需电脑解算,即可得到标准通用las格式的真彩色点云,用上电脑处理可得到mm级精细点云。可快速优质的完成多种测绘项目的数据采集。
激光三维扫描仪+3DGS是国产全自主研发的手持移动式激光雷达扫描仪。该系统具有360°旋转云台,可形成270°x360°点云覆盖,结合行业级SLAM算法,可在无光照、无GPS情况下获取周围环境高精度、高精细度的三维点云信息。激光三维扫描仪+3DGS采用一体化结构设计,内置控制和存储系统、内置可更换锂电池,一键式启动作业,使数据获取更加高效、便捷。激光三维扫描仪+3DGS可选用手机APP软件,查看和管理工程,可进行实时SLAM拼图和实时预览,进行固件升级和设备维护等。基于自主开发软件,可进行数据后处理、彩色点云生产、数据拼接、数据优化、浏览和量测等功能。
(1)270°x360°激光视场角 多线激光雷达安装在旋转电机云台上,进行旋转式扫描,可形成270°x360°的球形视场角,精准采集各个角落数据,保障数据的完整性。
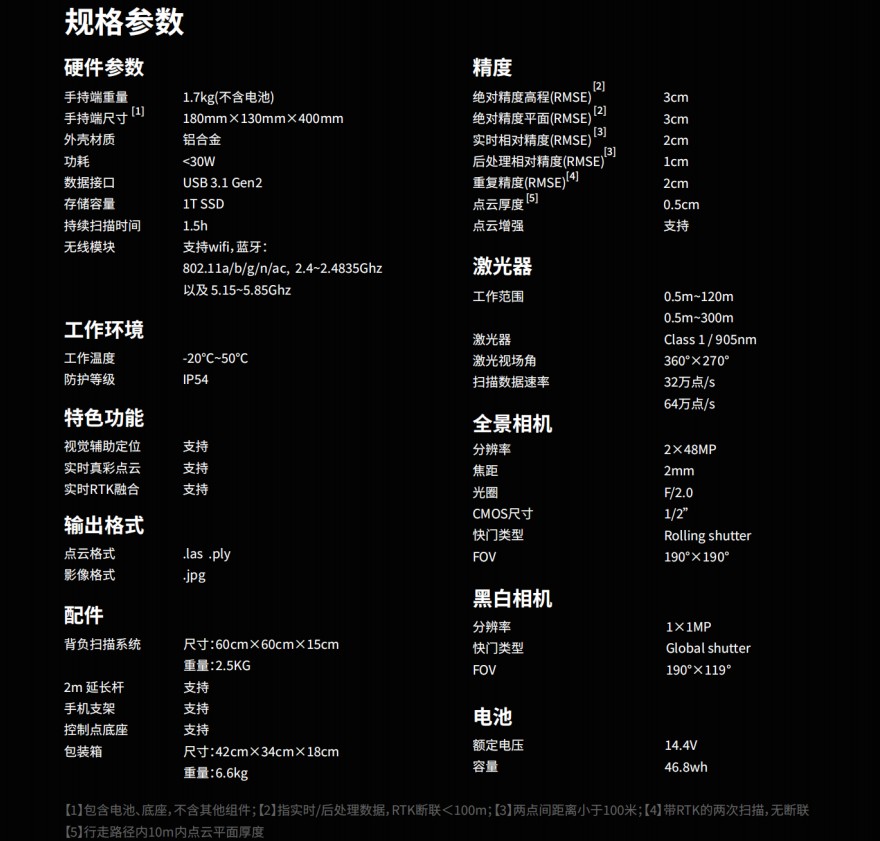
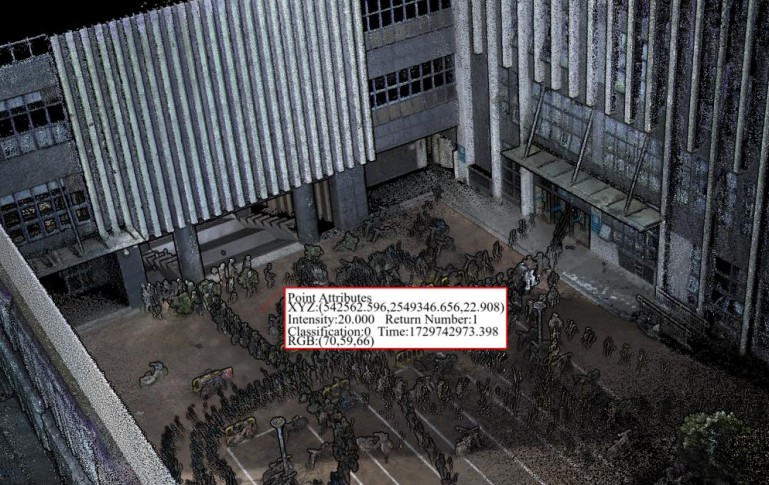
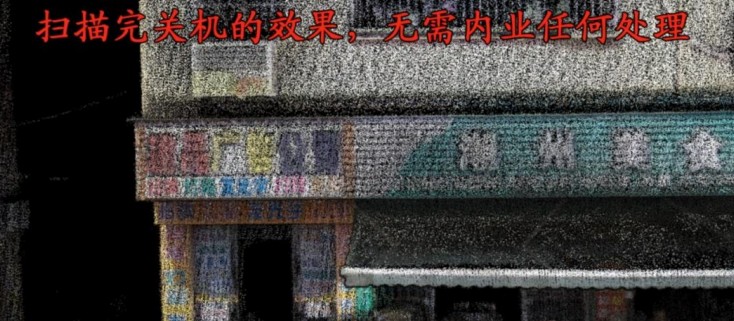
(2)高效率-实时解算 实时解算,机身内置强算力,扫描完关机无需内业任何处理,即可得到相对坐标系标准通用las格式的彩色点云。
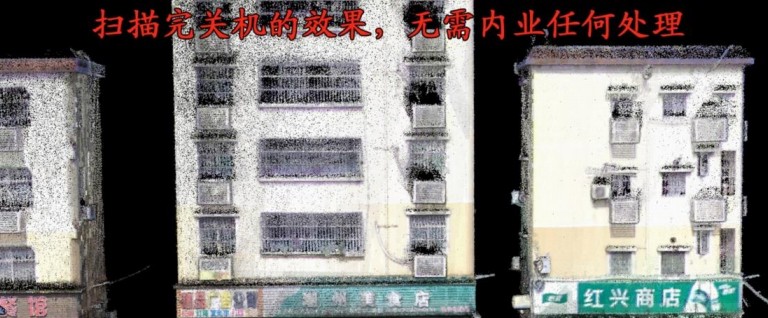
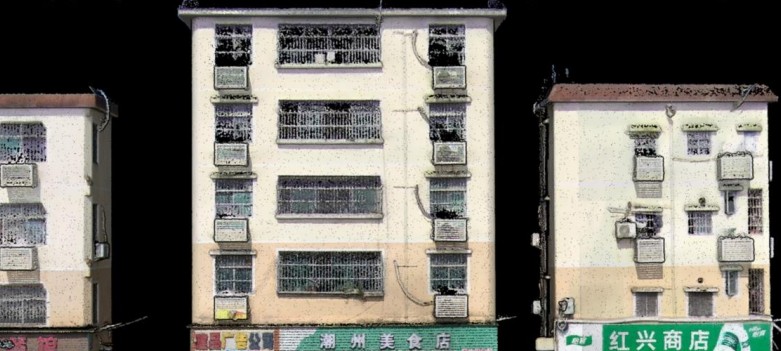
(3)高精细度-后处理解算 用上电脑解算,可得到精细的标准彩色点云,也可得到加密到5mm 点间距甚至 1mm 点间距的超精细彩色点云。
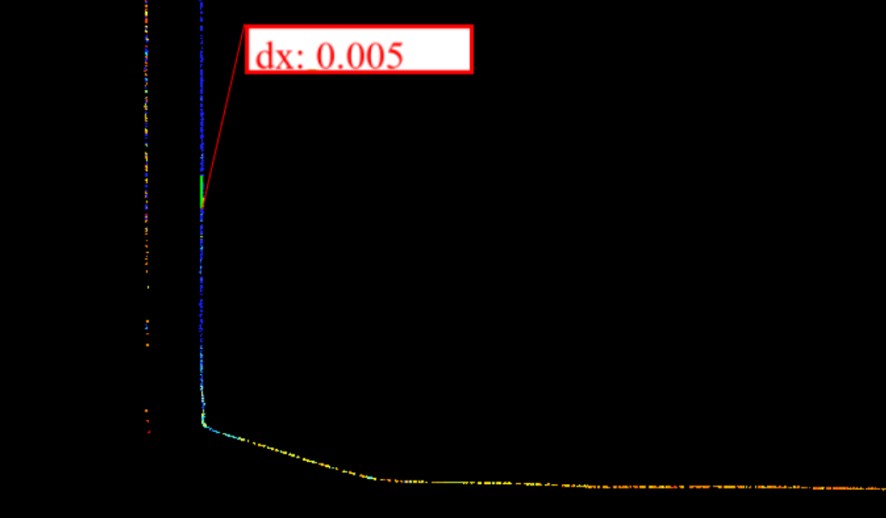
(4)高精度 得益于视觉辅助定位功能和优异的点云匹配算法,无需强制闭环扫描、无惧多次往返重复扫描,点云均能稳定重合。 点云水平度:无RTK 融合情况下为0.03°,有RTK融合的情况下为0.015°。 点云厚度:设备直出的点云厚度2cm,电脑后处理的点云厚度仅为5mm。 点云精度:相对精度1cm,绝对精度3cm。
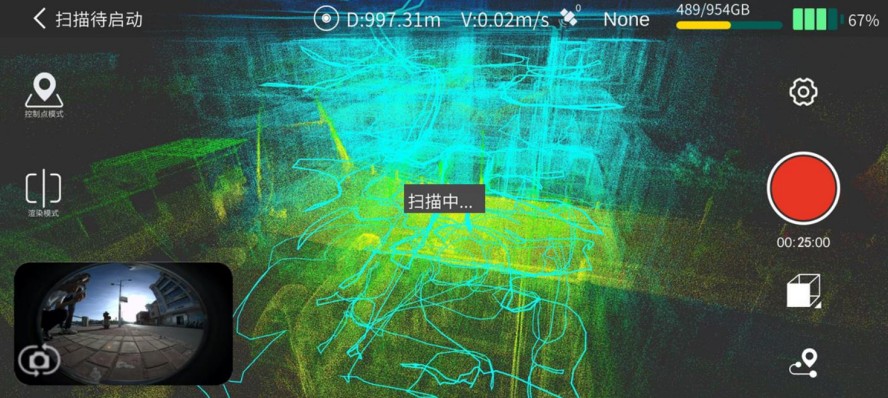
(5)APP实时查看扫描过程 可使用手机或平板进行实时数据采集和显示。
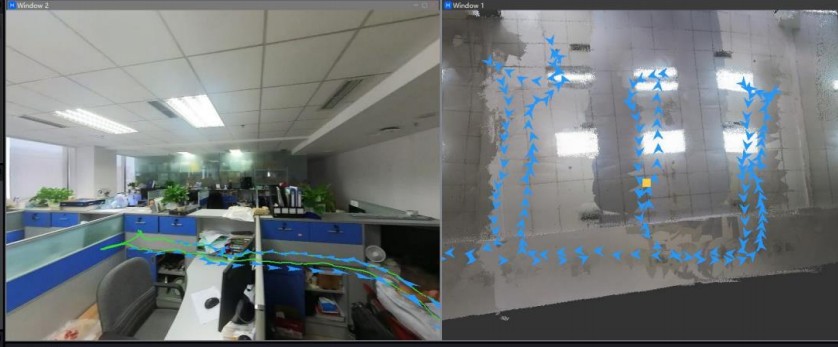
(6)视觉SLAM辅助匹配 机身内置相机可实现视觉辅助定位,在外业扫描过程中可有效的降低扫描人员的走位要求,使得扫描更轻松。人员走位随意也不容易造成点云分层错位。
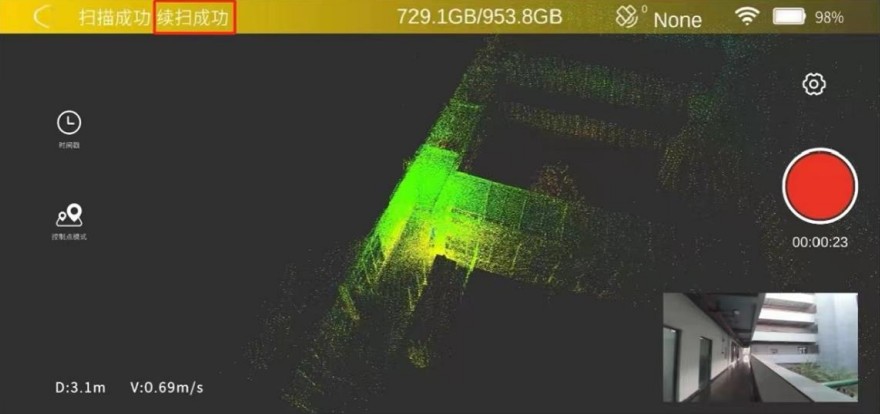
(7)续扫拼接 由于现场环境条件比较复杂,往往根据调查的深入需要补充扫描,在无卫星信号、无控制点的室内场景,可以基于已经扫描的工程项目,直接续扫,内业即可无需手工寻找特征点即可完成点云的拼接,非常方便。 满足大场景跨周期扫描,减少内业拼接麻烦。
(8)点云叠加(联动)全景照片 可实现基于立体点云,快速找到对应的全景图,特别是外立面绘图等场景可有效辅助绘图判断。
(9)RTK模块 可选配RTK模块,用于连接网络CORS,外业扫描完成无需电脑处理即可有绝对坐标彩色点云。经内业解算后精度更高。
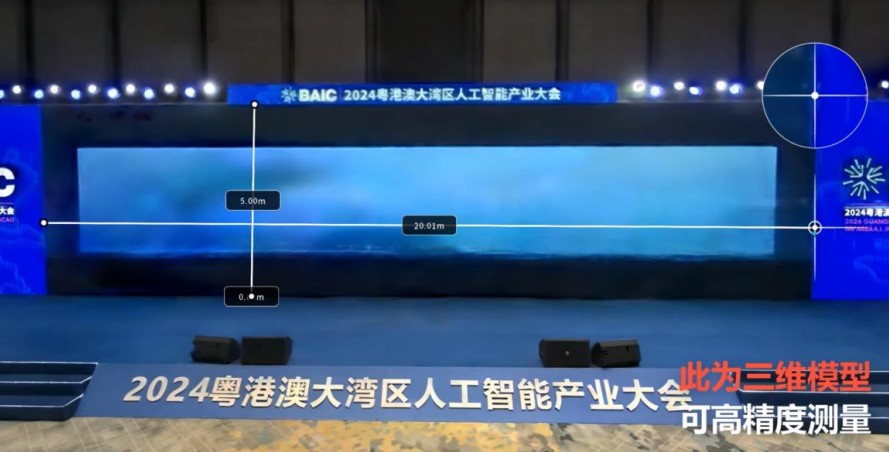
(10)一键生产实景三维模型 结合选配的自动实景建模软件,可一键生产具有高精度测量的室内外实景三维模型。 软件可将点云和全景图片自动生产实景三维模型,可将玻璃水管等细小反光物体建立模型,并能对接到UE或者Unity引擎的数字孪生系统使用。
©2021-2026 广东地空智能科技有限公司 版权所有 粤ICP备2021112163号-1